
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于摄影测量技术的房屋提取方法--以中国西部地区乡村为例
[范熙伟 , 聂高众
, 聂高众* , 邓砚, 安基文, 李华玥, 吴兵]
, 聂高众, 邓砚, 安基文, 李华玥, 吴兵]
|
|


〔作者简介〕 范熙伟, 男, 1986年生, 2015年于中国科学院地理科学与资源研究所获地图学与地理信息系统专业博士学位, 助理研究员, 目前主要研究方向为地震应急与减灾, E-mail:fanxiwei@ies.ac.cn。
房屋的分布位置、 面积和高度等信息对城乡规划、 地震应急和减灾等方面具有非常重要的作用。利用星载或机载可见光遥感图像进行地物信息自动提取, 是高效快速获取大面积房屋数据的重要手段。但是, 当出现同物异谱或异物同谱现象, 以及地物遮挡的影响时, 基于光谱信息的传统地物分类或提取方法房屋提取精度较低。文中选取新疆维吾尔自治区琼哈拉峻村房屋和农田光谱信息相似的地区, 利用小型旋翼无人机获取了在航向和旁向具有一定重叠度的可见光遥感图像。然后, 基于摄影测量原理获得了研究区的数字表面模型(Digital Surface Model, DSM)、 数字高程模型(Digital Elevation Model, DEM)和数字正射影像数据, 并在此基础上通过阈值分析DSM和DEM差值提取出房屋像元及其面积和高度等信息。通过与传统监督分类法对比发现, 使用摄影测量方法基于高度信息的房屋提取其用户精度和制图精度分别为88.69%和97.42%, 而监督分类法提取房屋的精度分别为43.23%和85.30%, 说明文中提出的方法在房屋和背景信号差别较小的区域时精度更高。
The key parameters of houses such as distribution, area and height play an important role for urban-rural planning, earthquake emergency and disaster mitigation. The computer automatic extraction method is an effective way to acquire large area house information using satellite-borne or airborne optical remote-sensing images. However, because of the similarity of spectral characters for different land cover types or the influence of snow coverage, the classification accuracy of house type using traditional spectral based method can be decreased. To acquire the accurate houses distribution, a method based on the height information is proposed using unmanned aerial vehicle(UAV)in this study. With UAV flying at the height of 100m above ground, the route of the UVA was planned with the heading direction overlap of 77% and side direction overlap of 50%for the nearby pictures. Taking Qionghalajun Village in Xinjiang Uygur Autonomous Region for example, 69 pictures of the study area were obtained with DJI Phantom 3 professional. With those pictures input into the EasyUAV software, the Digital Elevation Model(DEM), Digital Surface Model(DSM), and Digital Orthophoto Map(DOM)were acquired based on photogrammetry method using the overlapped optical remote-sensing images of UAV. After that, the house distribution and height were acquired with the differences between DSM and DEM images larger than 2.6m. To eliminate the influences of disintegrated pixels on the house extraction, mainly caused by the trees or noise point, the classification aggregation tool of ENVI software was used with the disintegrated pixels' area less than 4m2. Compared with visual interpretation result, the user accuracy and mapping accuracy of the house extraction method proposed in this study is 88.69% and 97.42%, respectively. In addition, to evaluate the performance of the proposed method, the result of traditional supervised classification method using DOM data acquired previously was compared with the result of new method. The results show that the new method is more accurate the user accuracy and mapping accuracy of the supervised classification method, which is 43.23% and 85.30%, respectively. Besides the study area in this study, the performance of the proposed method will be evaluated at the other places in the further study.
作为地表非自然要素的重要组成部分, 房屋的面积、 空间分布位置和高度或层数等信息在城乡规划、 地震应急和减灾、 高精度人口数量估算以及区域经济发展研究等方面发挥着重要作用(雷莉萍等, 2010; 王勇等, 2011; 熊立红等, 2012); 例如, 房屋位置是地震后搜救埋压人员非常重要的基础空间数据, 而地震伤亡人员数量的准确估算依赖房屋面积和层数作为输入(Feng et al., 2013; Huang et al., 2016)。伴随遥感技术的飞速发展, 目前机载或星载可见光遥感技术作为可高效快速获取大范围房屋数据的一种重要手段, 相比传统费时费精力的实地调查等方法具有诸多优势, 应用前景十分广阔(肖鹏峰等, 2006; 李祖传等, 2010)。目前利用遥感影像提取房屋数据, 包括人工目视判读和计算机自动解译2种方式(Ghaffarian et al., 2014; Manno-Ková cs et al., 2015; Geiß et al., 2015; Liasis et al., 2016)。其中人工目视判读由于判读人员先验知识和经验的引入而精度较高, 但该项工作费时费力, 效率较低。计算机自动解译中常用的监督和非监督分类等方法(赵春霞等, 2004), 当房屋信号与背景图像反差较大时提取精度较高; 但是当房屋在遥感图像上表现出的光谱特征与背景接近, 即异物同谱现象出现时(如有些道路或未利用地与房屋表现出相似的光谱特征, 冬季降雪后房屋与背景在图像上表现较为一致), 提取精度降低。
研究表明, 空间分辨率为m级或亚m级可见光遥感数据较为适用于房屋等建筑物的信息提取(罗明等, 2012); 例如, 中国第2次土地利用调查中使用了140多万km2的空间分辨率为0.6m的美国Quickbird卫星数据, 以及500多万km2的空间分辨率为2.5m的法国Spot卫星数据。但是, 高空间分辨率卫星遥感数据往往对应着较高的数据获取成本且数据时效性较差, 如Quickbird的重访周期为1~6d(明冬萍等, 2005)。而目前无人机遥感技术由于飞行高度较低, 可获得比卫星遥感数据质量更高的, 空间分辨率达cm级的可见光遥感数据, 且获取数据的成本远低于卫星遥感或有人机载遥感(汪沛等, 2014)。同时, 由于飞行高度低, 因而受云层遮挡等的影响较小, 飞行准备时间较短(以大疆旋翼无人机为例, 飞行准备时间仅30min左右), 使得利用无人机遥感技术提取房屋信息甚至房屋裂纹等细节信息变得越来越容易(胡勇等, 2016)。
考虑到高空间分辨率无人机遥感技术的诸多优势, 本文针对遥感中广泛存在的异物同谱问题, 即房屋信息与背景信息对比度较低时难以有效分离的现象(赵维兵, 2008), 研究利用传统航空立体像对数字摄影测量技术基于地表起伏数据提取房屋相关信息, 如分布范围、 面积和高度, 以提高房屋与背景对比度较低时的房屋提取精度。
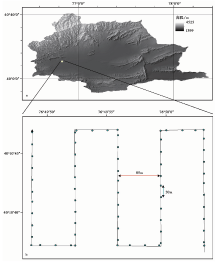
研究区为新疆维吾尔自治区克孜勒苏柯尔克孜自治州阿图什市下辖的哈拉峻乡琼哈拉峻村(中心经纬度为40.178° N, 76.832° E)。哈拉峻乡地处山区, 东部为喀拉巴什套山, 南部有喀拉塔克山, 西部为喀什噶尔山和博孜套山, 北部喀拉铁克山横贯全境, 四周环山形成1个盆地, 最低处海拔1, 550m, 最高处塔什阔坦能贝希峰海拔4, 562m。此外, 该地区气候属于温带大陆性干旱气候, 四季分明, 干旱少雨, 其中年平均气温12.9℃, 极端最高气温39℃, 极端最低气温-32 ℃, 年降雨量118.4mm。哈拉峻乡90m空间分辨率数字高程模型(Digital Elevation Model, DEM)与相应的Hillshade图的叠加见图1a, 本文选取的研究区在哈拉峻乡的相对地理位置见图1b。
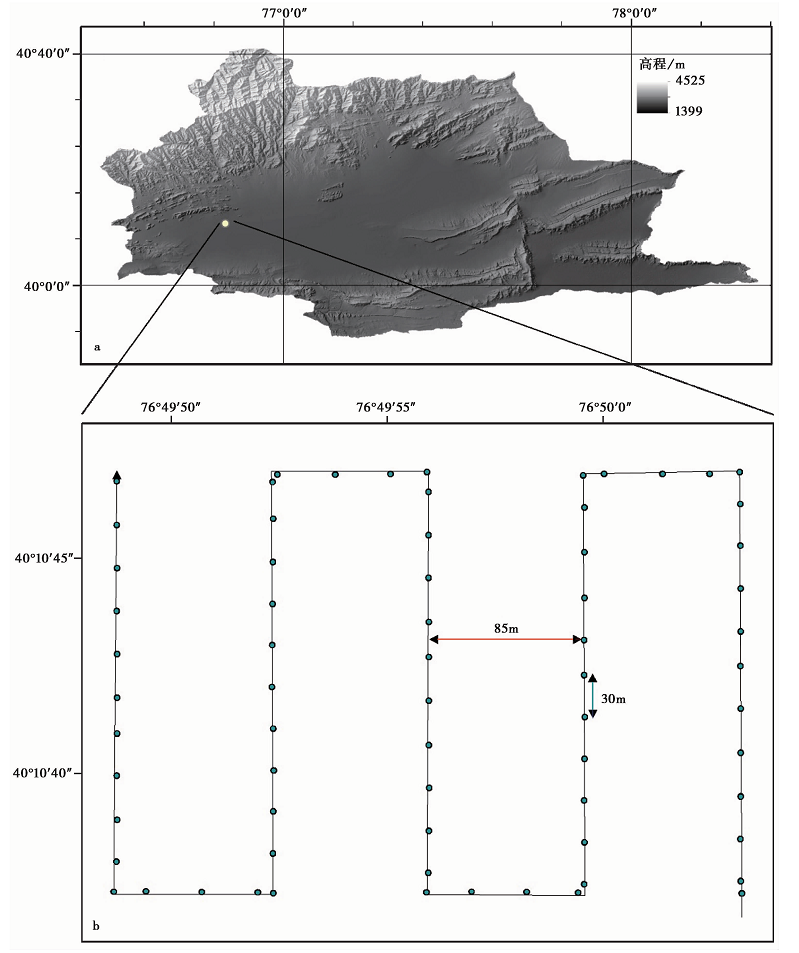 | 图1 哈拉峻乡Hillshade图(a)与研究区无人机飞行路线规划图(b)Fig. 1 The Hillshade map of the Halajun township(a)and flying track of UAV(b). |
由于气候干燥, 研究区内农田水分含量低, 反射率表现出与屋顶相似的光谱特征; 其次, 由于冬季气候寒冷, 容易形成降雪, 导致从冰雪覆盖的遥感图像上提取房屋特征更加困难。当与本研究区类似的地区, 即房屋和背景光谱特征相似或者冬季下雪天, 地震发生后使用人工判读技术亦很难提取受损或倒塌房屋情况。本文以该研究区无人机可见光遥感图像为基础数据进行基于房屋高度数据的房屋特征提取研究。
1.2.1 无人机系统和相机参数设置
本研究于2016年1月在新疆维吾尔自治区琼哈拉峻村使用小型旋翼无人机进行了遥感图像的获取, 无人机型号为大疆精灵3专业版, 该款无人机的相关性能参数见表1。其中, 无人机自带的光学成像相机其镜头由9组9片玻璃镜片组成, 包含2片非球面镜片, 拍摄视场角为94° , 焦距为4mm, 最大光圈F2.8, 曝光时间为8~
| 表1 本研究使用的无人机系统的主要参数 Table1 Key parameters of the unmanned aerial vehicle(UAV)used in this study |
考虑到实地调研时图像拍摄起始时间为北京时间13点44分(接近当地正午时间), 光照条件充足, 因而将曝光时间设置为
式(1)中, R为地面空间分辨率, 无人机拍摄影像的地面空间分辨率约为3.9cm, 优于航天平台可见光遥感图像的空间分辨率。考虑到上述无人机的视场角为94° , 当无人机在100m空中拍摄时, 每景影像覆盖的空间范围约为171.6m× 128.7m, 旁向比航向略长。
1.2.2 无人机飞行路线规划
由于实地调研时正值南疆空气温度较低的1月份, 考虑到无人机电池对飞行时间的限制(理论飞行时间约23min, 当海拔高度升高空气稀薄或气温降低时续航能力骤减), 飞行时每次(每块电池)覆盖空间范围约为500m× 400m。本研究规划的飞行路线见图1下部中的黑色线条, 即从研究区东南角开始, 按S形飞行路线进行拍摄, 到西北角结束。
为使得拍摄获得的图像满足后续构建摄影测量立体像对的需求, 相邻2幅图像需在航向和旁向分别满足75%和50%以上的重叠度。这里将无人机飞行速度设定为6m/s匀速飞行, 同时以5s为间隔进行拍摄(图1b中的实心点即为无人机相机的拍照点), 则航向的相邻2幅图像采样间隔为30m(见图1下图中的蓝色箭头)。由于每景图像在航向上的覆盖范围为128.7m, 则可知航向重叠度为77%; 此外, 相邻航线间间距设定为85m(见图1b中的红色箭头), 由于单景图像在旁向的覆盖范围为171.6m, 同时满足了相邻航线间旁向重叠度 > 50% 的需求。
1次飞行共拍摄获得了69幅高清真彩色遥感影像, 即真正采集数据的作业时间仅6min(北京时间13点44分开始, 13点50分结束), 其他时间为无人机升空以及返航所需时间。
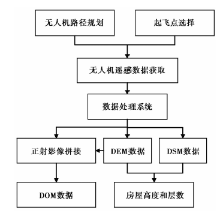
本研究采用北京天地智绘科技有限公司开发的EasyUAV快拼软件对琼哈拉峻村研究区无人机拍摄的遥感影像进行后处理。该款软件主要包括数字表面模型(Digital Surface Model, DSM)、 DEM、 正射影像图(Digital Orthophoto Map, DOM)、 真实三维密集点云、 真三维模型的生成等几个模块。这里将无人机获取的69幅遥感图像导入软件后建立工程文件, 同时导入由上述公司提供的无人机相机检校文件, EasyUAV快拼软件即可自动完成研究区DEM、 DSM和DOM的生成, 其基本流程见图2。
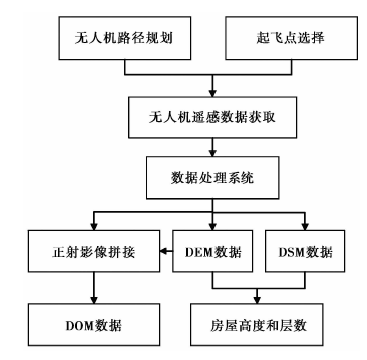 | 图2 无人机遥感图像后处理流程图Fig. 2 Procedure for acquiring house height using UAV remote sensing images. |
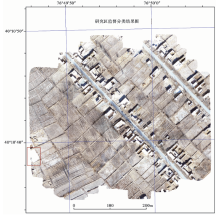
无人机遥感图像后处理的基本原理为: 首先, 无人机在飞行过程中按照航向77%和旁向50%重叠度对研究区进行拍摄, 即同一位置的相邻2幅图像按照不同角度进行拍摄, EasyUAV快拼软件利用保存在每幅影像头文件中的拍摄位置信息, 基于立体像对摄影测量原理即可获得研究区的DSM数据(程效军等, 2005)(图3a)。其次, 在DSM数据的基础上, EasyUAV快拼软件利用形态学滤波算法, 即在逐级扩大滤波窗口尺寸的过程中, 通过计算地表起伏的斜率, 由于山坡相对人工建筑一般坡度起伏更为平缓, 来辨别是否是人工建筑和树木还是平缓的地形(Zhang et al., 2003)。将地面上的建筑物、 树木等地表要素剔除后, 形成代表地形高低起伏的DEM数据(图3b)。最后, EasyUAV快拼软件基于DEM生成时计算得到的拍摄方位和拍摄角度信息, 对上述69幅可见光遥感图像进行正射校正和图像的镶嵌拼接, 生成该地区的DOM图(图4)。从图4可以看出, 有部分农田在真彩色图像上表现出与房屋屋顶相似的光谱特征, 例如图中红框内的部分实际为农田, 而异物同谱可能导致采用传统分类方法提取房屋数据时存在一定的误差。
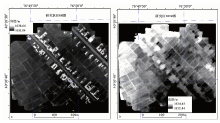
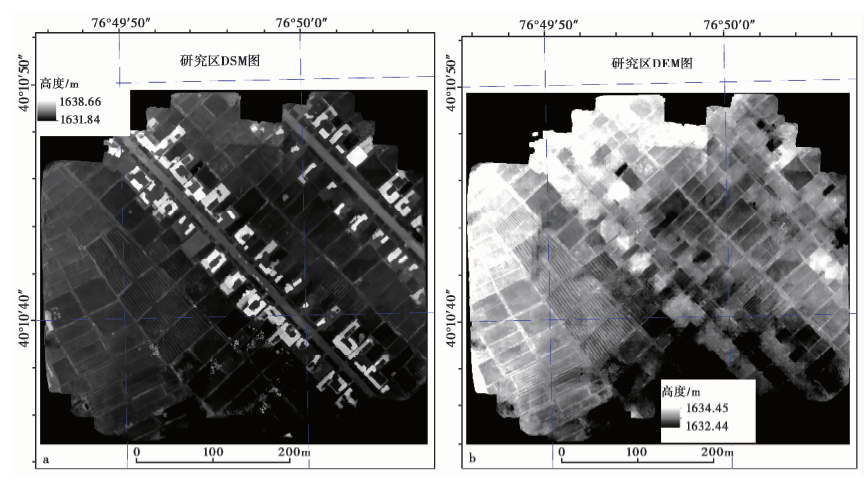 | 图3 EasyUAV输出的研究区DSM和DEM数据Fig. 3 The DSM and DEM images of the study area produced by EasyUAV. |
图3为本文使用EasyUAV软件基于69幅无人机可见光遥感图像, 利用立体像对摄影测量方法和形态学滤波方法, 构建的研究区DSM和DEM分布图, 可以看到DEM数据比DSM数据最高处降低了约4m, 可能是由于房屋被滤波处理后造成的。此外, 在DSM图像中房屋相比地面亮度较高, 表明采用高度信息提取房屋具有一定的可行性。
 | 图4 EasyUAV输出的研究区DOM数据Fig. 4 The DOM image of the study area produced by EasyUAV. |
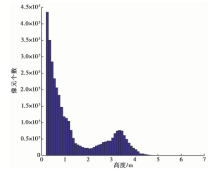
将EasyUAV快拼软件输出的DSM和DEM数据中相同位置的像素相减, 即可得到研究区房屋、 院墙和田坎等要素的高度。由于DSM和DEM高差< 0.2m的像元由大量田坎以及实际地表(0m高差)构成, 为使其不影响3m高度处房屋分布的分析, 这里提取出了图3中DSM和DEM对应高差> 0.2m情况下所有像元的频率分布直方图(图5)。从图5可以看出图像有2个波峰, 分别位于0.2m处和3.4m处。0.2m处的波峰是由实际地面或者田坎、 农田耕作后的隆起, 以及草垛等较低的地表突出物构成; 而3.4m处的波峰主要是由房屋、 院墙, 以及少量农民搭建的家畜用棚屋等构成。
 | 图5 研究区DSM和DEM高差> 0.2m时的频率分布直方图Fig. 5 Frequency distribution histogram of the differences between DSM and DEM as the differences greater than 0.2m. |
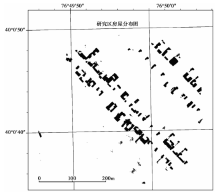
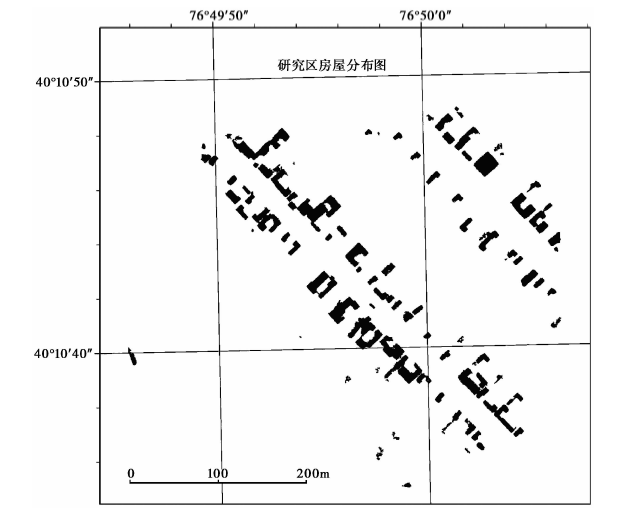
 | 图6 利用DEM和DSM高差提取出的房屋分布图Fig. 6 The houses of the study area classified using the differences between DEM and DSM. |
考虑到农村房屋一般高度> 2m, 这里统计得到图5中高差> 2m的像元的均值和标准差分别为3.15m和0.53m, 因而本研究将DSM和DEM高差> 2.6m的像元作为房屋, 即最小高差在均值1倍标准差范围内作为房屋提取的依据。图6为研究区内按照上述方法划分为房屋的像元, 采用黑色像元表示。从空间分布上看, 本方法提取出的房屋主要分布于道路两侧, 与图4真彩色图像反映出的房屋分布位置一致。此外, 从房屋图斑的形态特征上看, 本方法提取出的房屋图斑在拐角处呈现出近似直角, 具备房屋应有的形态特征。经过统计计算发现, 利用本方法提取的房屋总面积约为9, 979.94m2。
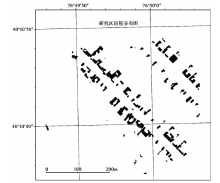
此外, 图像中存在零星非房屋类型被判定为房屋的情况, 可能是由于研究区内较多的柳树造成的。考虑到房屋由于需满足居住需求, 一般应大于某个面积。这里以4m2为阈值, 利用ENVI软件中的去除细碎图斑工具(classification aggregation)对图6中的结果进行进一步处理, 即将相邻房屋像元组成的图斑面积< 4m2的情况予以剔除, 结果见图7。处理后发现, 利用本方法提取的房屋总面积从9, 979.94m2增加到10, 113.27m2, 去除细碎图斑的目的是消除树木等带来的影响, 然而房屋面积却进一步增加。面积增加的主要原因是由于摄影测量计算误差或相机噪声的存在, 导致房屋图斑内零星分布若干错分为非房屋类别的细碎图斑(图8a); 而使用去除细碎图斑工具, 使得上述细碎斑块得以被正确划分为房屋类别(图8b)。
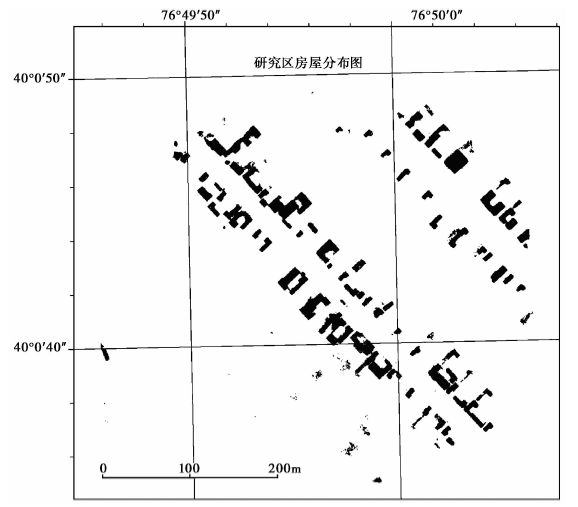
 | 图7 剔除细碎图斑后利用DEM和DSM高差提取出的房屋分布图Fig. 7 The houses of the study area classified using the differences between DEM and DSM with the influence of disintegrated pixels eliminated. |
 | 图8 使用细碎图斑剔除工具前后房屋提取结果对比图a 细碎像元剔除前, b 细碎像元剔除后Fig. 8 Comparison of house classification results with(a)and without(b)the disintegrated pixels eliminated. |
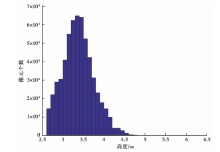
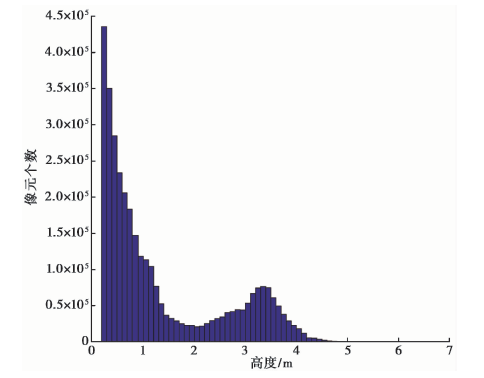
图9为利用高度信息正确分类为房屋类型的房屋高度频率分布直方图。从图中可以统计出约99.8%的房屋高度低于4.5m, 其中构成直方图的房屋像元其均值为3.37m, 标准差为0.38m。房屋平均值和最高高度说明, 该区域的房屋主要由单层房屋构成, 与实地调研的结果相一致, 而且房屋平均高度为3.3m。
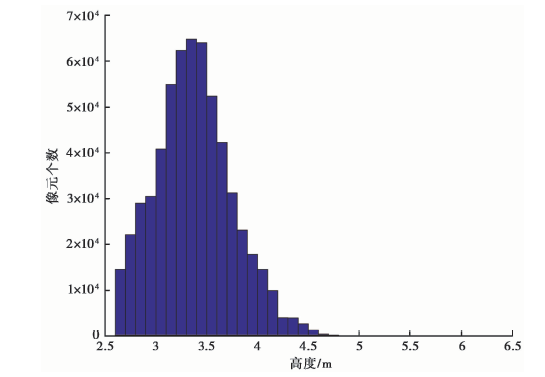 | 图9 利用高程数据正确分类为房屋类型的频率分布直方图Fig. 9 Frequency distribution histogram of the house pixels classified using difference of DEM and DSM images. |
为分析基于高程数据的房屋提取结果的精度和可行性, 这里利用传统较为精确的监督分类法作为对比。监督分类(supervised classification)又称训练场地法, 是以建立统计识别函数为理论基础, 依据典型样本训练方法进行分类的技术, 即根据已知训练区提供的样本, 通过选择特征参数, 求出特征参数作为决策规则, 建立判别函数以对各待分类影像进行的图像分类, 是模式识别的1种方法。要求训练区域具有典型性和代表性。判别准则若满足分类精度要求, 则此准则成立; 反之, 需重新建立分类的决策规则, 直至满足分类精度要求为止。本研究的监督分类具体按照以下5个步骤进行。
(1)类别定义。通过目视判读经拼接后的DOM真彩色图像, 可以发现待分类研究区主要由4种地物构成: 即房屋和房屋阴影、 农田、 道路。这里按照这4种类型进行接下来的样本选择和图像分类工作。
(2)样本选择。为完成监督分类, 需要在遥感图像处理软件中进行训练样本的选择。本研究选取ENVI遥感图像处理平台, 利用其中的ROI(Region of interest)工具进行训练样本的选择。按照上述提到的4种类别, 每种类别选择若干个(4~5个)典型区域作为样本。选择完训练样本后, 使用ROI面板中的Compute ROI Separability工具计算各个类型样本间的可分离性, ENVI中采用Jeffries-Matusita, Transformed Divergence参数表示, 可分离度的数值在0~2, 数值越大, 可分离度越高。计算结果为房屋和农田的可分性值为0.92~1.53, 房屋和道路的可分性> 1.94, 房屋与阴影的可分性为2.00。因此除了目视观察DOM可见光图像, 上述统计值也同时说明使用监督分类时, 房屋和农田间将存在一定程度的分类误差。
(3)分类器选择。一般根据待分类图像的复杂度和分类精度需求等确定选用哪一种分类器。目前监督分类可分为基于传统统计分析学的, 包括平行六面体、 最小距离、 马氏距离、 最大似然法分类; 基于神经网络的; 基于模式识别的, 包括支持向量机、 模糊分类等。考虑到本次分类采用的图像仅有红、 绿、 蓝3个波段, 且图像中的地物类别较为单一, 本研究拟采用最大似然法进行图像分类。
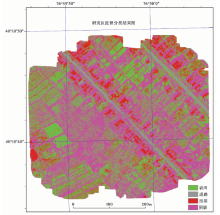
(4)影像分类。使用ROI提取的监督分类样本和最大似然法分类器, 即可对EasyUAV软件拼接输出的DOM真彩色遥感图像进行分类, 图10为分类结果, 其中农田用绿色表示、 道路用灰色表示、 房屋用红色表示、 房屋阴影用粉红色表示。从图9监督分类结果图和图4研究区DOM真彩色图像对比可以发现, 道路类型与真彩色图像的空间分布较为一致。但是, 由于异物同谱的影响, 部分用红色像元表示的房屋被错分到了农田中, 典型例子为图4中红色方框中的农田被错分为房屋(见图9相应位置), 而基于高程信息的分类法即可避免此类问题(见图6中的相应位置)。此外, 尽管无人机拍摄为北京时间13点40分左右, 但是由于正值冬季且该研究区纬度较高, 造成房屋、 树木和田垄等存在一定的光照阴影, 因此图像中本身为农田的部分, 被归为房屋阴影, 即分类图中粉红色不规则条带地物。
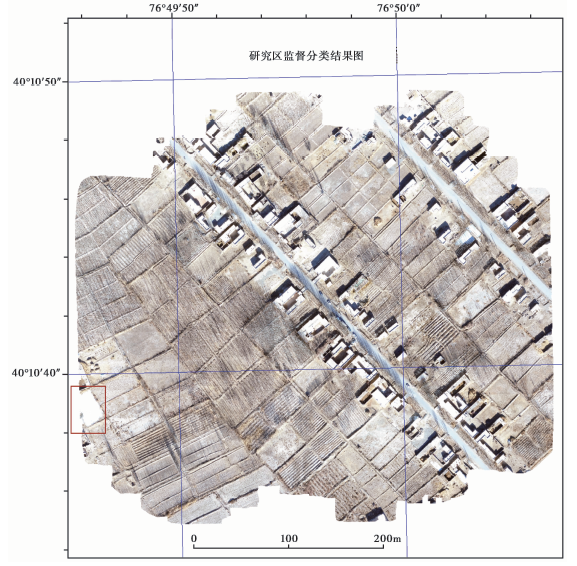
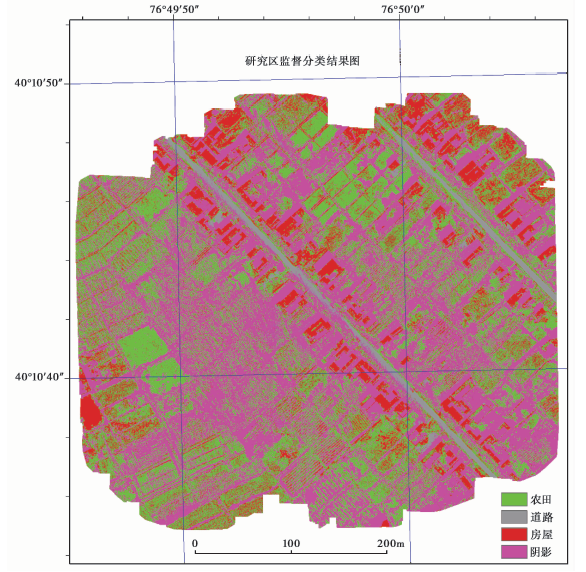 | 图10 研究区DOM真彩色图像监督分类结果Fig. 10 The supervised classification result using DOM image of the study area. |
(5)结果验证。为评价监督分类方法提取房屋数据的精度, 考虑到分类使用的无人机遥感图像空间分辨率优于4cm, 这里通过目视解译的方式, 同时结合实地考察若干采样点的形式进行地表类型真值的提取。通过ROI工具提取各种类别若干个采样样本后(尽量与分类样本有所区别, 其中房屋类别中所有的房屋都进行提取), 使用ENVI中的Confusion Matrix工具基于分类后图像和上述提取的ROI真值进行分类结果的验证。
监督分类精度分析报告发现, 房屋、 农田、 道路和阴影的用户精度, 表示假定分类器将像元归到A类时, 相应的地表真实类别是A的概率, 计算方法为正确分到某类的像元总数与分类器将整个影像的像元分为该类的像元总数比率, 依次为43.23%、 95.21%、 94.74%和40.47%; 此外制图精度, 表示假定地表真实为A类, 分类器能将1幅图像的像元归为A的概率, 计算方法为分类器将整个影像的像元正确分为某类的像元数与该类真实参考总数的比率, 上述4种类型的制图精度依次为85.20%、 57.83%、 89.18%和99.75%。从房屋的统计数据可以看出, 即用户精度较低而制图精度较高, 说明分类图像中有很大一部分的非房屋类型(主要为农田)被错分为了房屋, 而85%的房屋类型能够被正确归为房屋。同时农田类型像元有一部分被错分为其他类型, 即被当做房屋或者阴影。
将所有房屋通过目视判读提取出后(视为真值), 可以统计得到其总面积为8, 970.27m2, 约占研究区总面积的3%。考虑到本研究主要评价房屋这一种类型的提取精度, 为与监督分类提取结果的精度评价指标保持一致, 这里没有采用总体分类精度, 而使用制图精度和用户精度进行分类或提取结果的对比和分析。
将目视判读结果和基于高程信息的房屋提取结果进行叠置分析后发现, 当未剔除细碎图斑时, 基于高程信息提取出的房屋像元被正确划分为房屋的面积为8, 283.35m2(基于高程信息提取出的房屋像元与目视判读房屋像元取交集), 而基于高程信息提取出的房屋总面积为9, 979.94m2, 可以计算得到上述提出的方法制图精度为92.34%(8, 283.35/8, 970.27), 而用户精度为82.99%(8, 283.35/9, 979.94)。
同时, 可以计算得到剔除细碎图斑后, 基于高程信息的房屋提取方法的提取精度(表2)。由表2可以看到, 利用基于高程信息的房屋提取方法提取与背景光谱相似地区的房屋时, 相比监督分类法85.30%的制图精度和43.23%的用户精度, 房屋提取精度分别提高了12.12%和45.46%。
| 表2 监督分类和基于高程信息的分类方法房屋提取精度 Table2 The accuracy of different methods to classify house |
异物同谱现象是困扰遥感手段基于光谱信息提取地物类型的主要因素之一。为了在地震后能准确掌握埋压人员的位置, 同时准确评估地震人员伤亡数量, 需要准确快速掌握一定区域范围内房屋的分布和高度(楼层)等信息。然而, 由于某些农田或者未利用地与房屋光谱属性存在异物同谱现象, 导致传统监督或非监督分类方法提取房屋存在一定的误差。
本研究选取新疆维吾尔自治区琼哈拉峻村作为研究区, 首先通过飞行路径规划, 利用目前常见且易用的小型旋翼无人机拍摄了在旁向和航向均具有一定重叠度的可见光遥感图像。然后利用EasyUVA快拼软件获得了研究区DSM、 DEM和DOM图像。通过将DSM和DEM图像做差, 并分析差值图像的频率分布直方图, 以2.6m高差为阈值提取出了研究区房屋数据。为分析该方法提取房屋数据的精度, 本研究以传统较为成熟的监督分类法为例利用EasyUVA快拼软件输出的DOM数据进行了监督分类。对比分类结果发现, 监督分类法提取的房屋数据的用户精度为43.23%, 而基于高度信息的新方法房屋提取精度为88.69%。表明新方法在房屋提取精度方面比传统方法具备优势。
此外, 这里需要指出的是, 由于本次研究所选的研究区的地势较为平坦, 利用高程信息房屋提取算法的精度较高, 但是在接下来的研究中需要分析该方法在地势起伏较大地区的精度和可行性。同时, 有雪覆盖情况下该方法的精度和可靠性如何, 还需要进一步通过获取实际数据进行检验。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|