

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
利用无人机摄影测量技术提取活动构造定量参数
[艾明1)  , 毕海芸
, 毕海芸1), * , 郑文俊2) , 尹金辉1) , 袁道阳3) , 任治坤1), * , 陈干1) , 刘金瑞1) ]
, 毕海芸, 郑文俊|
|


〔作者简介〕艾明, 男, 1993年生, 2015年于武汉大学获测绘工程专业学士学位, 现为中国地震局地质研究所构造地质学专业在读硕士研究生, 主要从事活动构造与摄影测量方面的研究工作, E-mail: aiming_cea@163.com。
近年来, 随着摄影测量技术的发展以及无人机技术的普及, 利用无人机摄影测量技术快速获取断裂带上高精度和高分辨率的地形地貌数据已成为1种重要的技术手段。文中首先介绍了1种简单高效且成本较低的新型数字摄影测量技术--SfM(Structure from Motion)方法的基本原理与作业流程, 并选取青海茶卡盆地北缘断裂上1个典型的断错地貌点进行了无人机航空影像数据的采集和处理, 最终生成了空间分辨率为6.1cm的高分辨率数字高程模型(DEM), 点云密度高达273点/m2, 覆盖面积达0.463km2。其次, 利用地形剖面分析方法提取了平行于断层方向的地形剖面和坡度剖面等数据, 结合基于DEM生成的等高线图和坡度图, 对复杂的多级地貌面进行了精细的解译和定量研究。最后, 基于地貌精细解译的结果, 通过DEM提取的地形剖面数据确定了T1-T3阶地的垂直位移分别为(1.01±0.06)m、 (1.37±0.13)m和(3.10±0.11)m, T4和T5阶地垂直位移的下限分别为(3.77±0.14)m和(5.46±0.26)m, 获取了通过传统遥感影像难以直接获得的垂直位移信息, 展示了无人机摄影测量技术在活动构造定量研究中广阔的应用前景。
, BI Hai-yun, ZHENG Wen-junWith the development of photogrammetry technology and the popularity of unmanned aerial vehicles(UAVs)technology in recent years, using UAV photogrammetry technology to rapidly acquire high precision and high resolution topographic and geomorphic data on the fault zone has gradually become an important technical means. This paper first summarizes the basic principle and workflow of a new digital photogrammetry technology, SfM(Structure from Motion), which is simple, efficient and low cost. Using this technology, we conducted aerial image acquisition and data processing for a typical fault landform on the northern of Caka Basin in Qinghai. The digital elevation model(DEM)with 6.1cm/pix resolution is generated and the density of point cloud is as high as 273 points /m2. The coverage area is 0.463km2. Further, the terrain and slope data parallel to the fault direction are extracted by topographic analysis method, and combined with the contour map and the slope diagram generated by the DEM, a fine interpretation and quantitative study of complex multilevel geomorphic surfaces is carried out. Finally, based on the results of sophisticated interpretation of geomorphology, we got the vertical displacements of the T1 terrace to the T3 terrace as(1.01±0.06)m, (1.37±0.13)m and(3.10±0.11)m, and the minimum vertical displacements of the T4 terrace and the T5 terrace as(3.77±0.14)m and(5.46±0.26)m, respectively, through the topographic profile data extracted by DEM. Such vertical displacement parameters are difficult to obtain directly by traditional remote sensing images, which shows the great application prospect of UAV photogrammetry technology in the quantitative study of active tectonics.
在活动构造的研究中, 为了揭示断裂活动规律、 量化断裂活动强度、 探讨发震机理, 需要获取一系列表征其活动特征的定量参数, 如断裂长度、 同震位移、 断裂活动的长期累积位移等(邓起东等, 2004; Arrowsmith et al., 2009; Zielke et al., 2012)。而高精度和高分辨率的地形地貌数据能够刻画细微的地貌特征, 是活动构造定量研究的基础(Zielke et al., 2010; Bi et al., 2017)。活动构造研究中所使用的传统测量方式, 如全站仪或皮尺测量, 不仅受限于野外的自然条件, 而且受限于人工操作, 效率低、 成本高, 从而限制了大范围高精度地形数据的获取(刘静等, 2013; 王朋涛等, 2016; Bi et al., 2017)。近年来, 激光雷达扫描(LiDAR, Light Detection And Ranging)技术的出现为快速获取大范围高精度的地形地貌数据提供了1种前所未有的解决方案(刘静等, 2013), 这种方便高效的主动遥感技术不仅可以实现大范围高精度扫描, 而且可以利用多重回波信号剔除植被覆盖的影响(Cunningham et al., 2006; Zielke et al., 2010; Lin et al., 2013; 刘静等, 2013; 陈涛, 2014), 然而其高昂的成本和复杂的后期数据处理限制了该方法的大众化应用(Johnson et al., 2014)。
近年来, 随着数字摄影测量技术的发展, 出现了1种名为SfM(Structure from Motion)的新型数字摄影测量技术(Snavely et al., 2008; James et al., 2012; Westoby et al., 2012; Fonstad et al., 2013; Bemis et al., 2014; Micheletti et al., 2015; Bi et al., 2017)。该方法通过影像的特征提取和匹配, 从具有一定重叠度的无序影像中恢复摄影瞬间相机的相对位置和姿态, 利用立体摄影测量原理重建场景的三维结构。该方法不仅可以将不同高度、 不同摄影角度甚至不同相机获取的影像数据组合在一起进行处理, 而且对摄影相机没有特别的要求(Bemis et al., 2014), 极大地提高了数据获取的便利性与灵活性。与LiDAR技术相比, 该方法不仅操作简单, 而且成本低廉, 在数据精度和点云密度方面二者可以达到同级水平(Harwin et al., 2012; James et al., 2012), 在植被覆盖稀少的地区可以成为媲美LiDAR技术的1种高精度地形数据获取方案。
迅速普及的小型无人机为SfM摄影测量技术提供了平台基础。相比氦气球、 滑翔机和小型航空飞机等航空摄影平台, 小型无人机具有成本低、 数据采集效率高、 机动灵活等优点, 因而在众多领域中得到了广泛的应用, 如冰川消融分析、 海岸调查、 滑坡监测、 资源与环境监测调查等(James et al., 2012; Whitehead et al., 2013; Lucieer et al., 2014)。无人机摄影测量技术为快速获取断裂带高精度和高分辨率的地形地貌数据提供了有力支撑, 也为活动构造的定量化和精细化研究带来了新的契机。本文针对一般野外地质地貌调查和遥感影像解译中难以识别和精确获取的断层垂直位移信息这一关键问题, 以青海茶卡盆地北缘断裂上1个典型的断错地貌点为例, 介绍了SfM摄影测量技术原理和作业流程, 并通过对最终生成的高精度DEM数据进行定量分析, 对复杂的多级地貌面进行了精细的解译, 进一步获取了通过平面航片、 卫片难以直接获得的断层垂直位移量, 探讨了SfM摄影测量技术在活动构造精细微地貌研究中的应用前景。
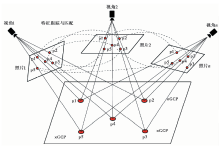
SfM方法是1种从平面影像重建三维场景的技术, 随着计算机视觉的发展被引入到数字摄影测量方法中。SfM方法利用高效的尺度不变特征变换(SIFT, Scale-invariant Feature Transform)算法进行影像特征检测(Lowe, 2004), 从多幅图像中提取与尺度缩放、 旋转、 亮度变化无关的特征向量(Moreels et al., 2007), 并进行SIFT特征跟踪与匹配(图1)。基于匹配好的特征, 初步估算相机的空间位置以及场景结构, 然后利用迭代光束平差方法精确求解相机的空间位置以及场景结构(Harwin et al., 2012; Mancini et al., 2013; Bemis et al., 2014; Javernick et al., 2014; Lucieer et al., 2014), 从而获得由特征点构建的稀疏点云框架。为了获取密度更高的点云数据, 需要在影像间进行逐像素搜索和匹配, 基于多视角立体摄影测量原理生成大量的匹配点, 得到更密集的点云数据(Johnson et al., 2014)。通过对密集点云进行绝对坐标校正和空间插值, 最终可以得到具有真实地理坐标的点云和数字高程模型(DEM)等地形数据。
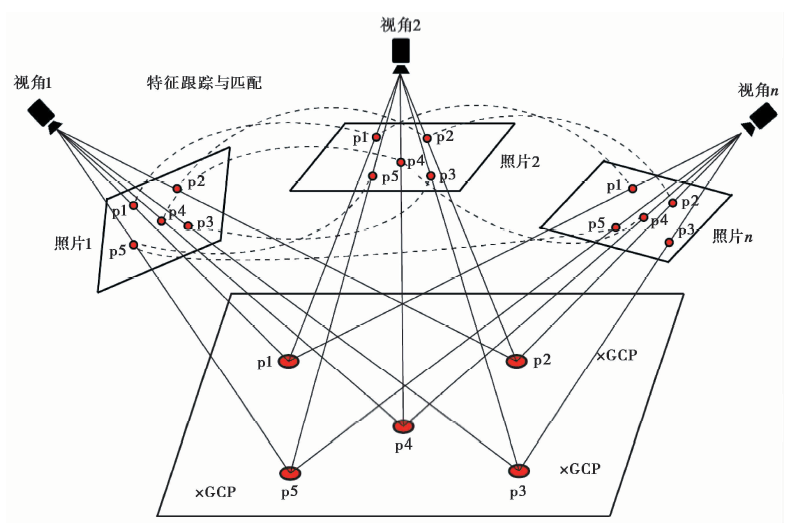 | 图1 SfM摄影测量方法的基本原理(修改自毕海芸等, 2017)Fig. 1 Basic principle of the SfM photometry(adapted from Bi Hai-yun et al., 2017). |
由于利用SfM方法生成的地形模型本身不具备空间地理位置和尺度信息, 因此需要对地形模型进行地理位置和尺度校正。一些无人机摄影测量系统集成了GPS定位模块, 摄影时可以将GPS实时定位信息存储在照片的属性信息(EXIF)之中(王朋涛等, 2016), 在后期数据处理时可以利用这些信息来生成地形数据。然而由于GPS模块实时定位的精度有限, 往往最终生成的地形模型精度不佳(Turner et al., 2012)。另外, 部分无人机摄影测量系统并未集成GPS定位模块, 导致最终生成的地形模型没有地理位置和尺度信息。因此地形模型地理位置和尺度信息的有效建立, 强烈依赖于高精度的地面控制点(GCPs, Ground Control Points)的加入。在进行影像数据采集之前, 可以在研究区均匀布设一定数量的地面控制点, 并使用全站仪或差分GPS获取每1个地面控制点的空间坐标。
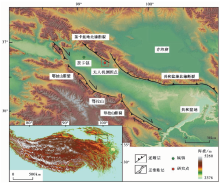
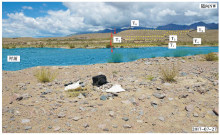
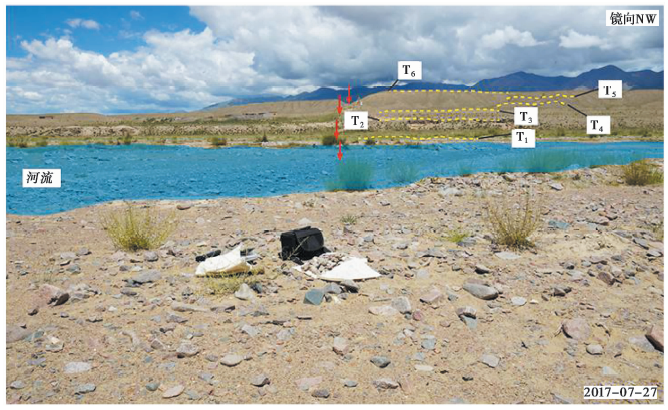
茶卡盆地北缘断裂位于青藏高原东北缘柴达木-祁连山活动地块内部(图2), 断裂长约40km, 以逆冲性质为主, 沿断裂存在明显的断层陡坎, 其最新活动形成了一系列断错微地貌, 山前多个断层剖面揭示了该区域存在多期古地震事件(张启胜等, 1996; Woerd, 1998; 袁道阳, 2003; 袁道阳等, 2004; Yuan et al., 2011)。由于该断裂位处青藏高原气候和交通条件均较差的区域, 多年来对该断裂的研究并不充分。通过前期的野外踏勘和考察发现, 位于该断裂上的小水桥研究点(36° 40'46.23″N, 99° 21'6.40″E)存在多级河流阶地被断层错断的地貌现象(图3), 在地表形成了高度不一的断层陡坎, 这些典型的断错地貌现象为运用定量地貌学方法研究活动断裂提供了基础。
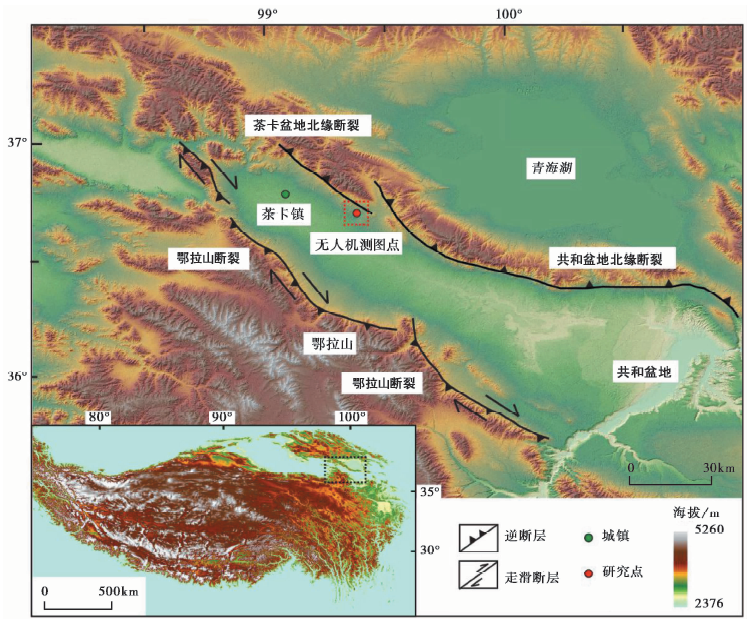 | 图2 研究区位置及其周围构造简图Fig. 2 Simplified tectonic map of the study area. |
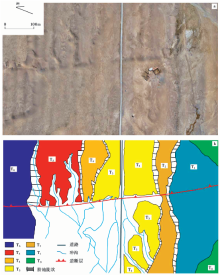
 | 图3 研究区地貌特征及初步解译图Fig. 3 Geomorphology features and preliminary interpretation map of the study area. |
SfM摄影测量技术的发展为获取该断裂一系列定量地貌参数提供了强有力的支撑。该区域植被稀少, 后期数据处理时植被因素造成的影响很小, 符合SfM摄影测量方法数据获取的选址要求。同时由于通过航片和卫片难以识别地表微小的变形特征, 也难以精确地获取各级阶地的垂直断错量, 该研究点能够很好地检验无人机摄影测量技术在活动构造定量研究中的实际应用效果。
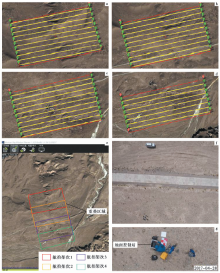
利用Motoar Sky MS-670四旋翼无人机系统(图4a)对青海茶卡盆地北缘断裂上发育多级河流阶地的小水桥研究点进行了影像数据的采集。该无人机系统搭载了焦距为16mm的索尼ILCE-QX1相机, 保证了影像分辨率高、 畸变小以及色彩还原度高的特性, 利于后期处理数据时影像特征的提取和匹配。尽管该无人机集成了GPS定位模块, 但为了保证数据精度, 在开始采集影像数据之前, 在测图区域均匀布设了33个地面控制点, 之后使用Trimble R8差分GPS(图4b)进行了实测, 浮动测量精度在cm级(水平精度: ± 10mm+1ppm RMS; 垂直精度: ± 20mm+1ppm RMS), 有效避免了DEM数据发生扭曲变形。地面控制点为边长40cm(图4c)的棋盘格, 保证后期数据处理时地面控制点的中心能够被有效识别。本次采集影像数据时的环境条件为晴朗弱风, 一方面能够保证无人机飞行的安全性和稳定性, 另一方面也有利于保留地物的光学纹理特性, 有助于后期数据处理时进行影像之间的匹配。无人机的飞行高度为60m, 保证了较高的地面分辨率, 而且能够清晰地从影像上识别地面控制点。为了避免或减少数据缺失或数据空洞现象的发生, 将影像的重叠度设置为80%, 以保证大部分区域的影像覆盖度在9张以上, 并使用较小的摄影角度(约10° )进行影像数据的采集。该无人机系统集成了地面控制站, 可以实现预编飞行。通过设置飞行覆盖区域、 飞行高度和影像重叠度等参数, 根据摄影参数之间的定量关系, 自动计算拍照时间间隔, 极大地提高了数据获取的自动化程度。在设置好飞行区域后, 地面控制站将根据相机参数、 飞行高度和影像重叠度之间的关系自动生成 “ 弓” 字形航线(图5a-d), 再将航线和摄影相关参数上传至无人机后, 即可按照预设航线采集影像数据。影像采集过程共耗时约2h, 分为4个架次, 相邻架次采集的影像所覆盖的区域有一定的重叠(图5e), 以便于后期的影像拼接。 数据采集过程中的一些相关参数如表1所示。
 | 图4 无人机数据采集系统 a Motoar Sky MS-670四旋翼无人机系统, 搭载索尼ILCE-QX1相机; b Trimble R8 差分GPS测量系统; c 地面控制点(GCPs)标记, 边长40cmFig. 4 Unmanned aerial vehicle data acquisition system. |
 | 图5 无人机数据采集航线规划 a-d 无人机数据采集航线设置; e 航拍架次与对应的测图区域; f-g 野外工作图Fig. 5 Route planning for unmanned aerial vehicle data acquisition. |
| 表1 数据采集过程中的一些相关参数 Table1 Some related parameters in the process of data acquisition |
获取了具有一定重叠度的影像之后, 可以选择集成了SfM算法的商业或开源软件进行数据后处理, 如PhotoScan、 Pix4D、 Pix Studio、 Acute3D、 VisualSFM以及SFMToolkits等(Bemis et al., 2014)。以常用的半自动化商用软件PhotoScan为例, 影像数据的处理流程包括以下4步: 1)将成像质量高的影像数据导入PhotoScan软件。导入影像之前需要对影像进行预处理, 剔除一些成像模糊、 光照条件不佳以及不在场景里面的影像。如果影像的属性信息(EXIF)里含有GPS坐标信息, 则会明显加快后续影像的对齐的速度; 2)检测影像特征并完成影像间的特征匹配, 恢复影像的相对位置关系, 并根据多视角立体摄影测量(MVS)原理在影像对之间进行逐像素搜索和匹配, 最终生成高密度的点云数据; 3)导入地面控制点坐标对生成的密集点云进行绝对坐标校正, 从而将密集点云约束到现实地理坐标系中; 4)生成网格和纹理, 最终生成具有空间地理坐标的点云、 数字高程模型(DEM)以及数字正射影像(Bemis et al., 2014; Johnson et al., 2014; Bi et al., 2017)。
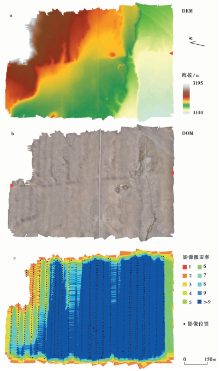
本次数据处理使用配备了32G RAM、 Intel(R)Xeon多核处理器的图形工作站。基于无人机采集的影像数据和布设的33个地面控制点, 最终生成了分辨率为6.1cm的高分辨率DEM数据(图6a)和分辨率为1.51cm的正射影像(图6b), 点云密度高达273点/m2。影像的平均有效重叠约为7.4次, 照片密度图显示60%以上的区域影像覆盖度在9张以上(图6c)。通过高分辨率的DEM图可以清晰地显现断层陡坎的形态(图6a), 实现了对断层几何特征和地貌特征的高清晰度再现。
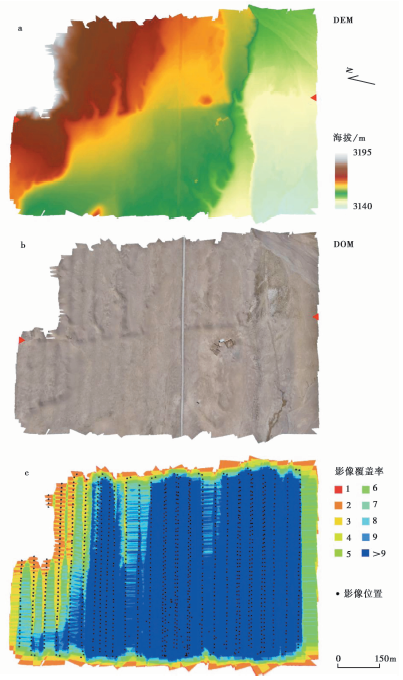 | 图6 数据处理结果 a DEM山体阴影渲染图; b 高分辨率的数字正射影像(DOM); c 航拍照片重叠密度图Fig. 6 Data processing results. |
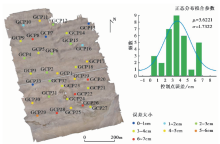
为了检验SfM摄影测量方法生成的地形数据精度, 对所布设的33个地面控制点进行了误差统计(表2), 并绘制了频数分布直方图。通过频数分布直方图可以发现, 33个地面控制点的最大误差≤ 7cm, 且近似服从正态分布, 正态分布曲线中均值μ =3.622i1cm, 标准差σ =1.732i2cm, 如图7所示。该地形数据完全能够反映地表的形态特征, 可以满足本文活动构造定量参数提取的精度要求。
| 表2 精度检验结果 Table2 Accuracy checking results |
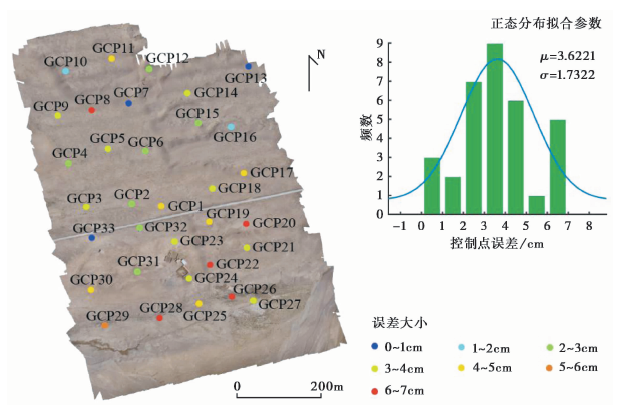 | 图7 控制点误差分布与误差大小Fig. 7 The GCPs error distribution and error size. |
本文选取的研究点位置上发育了多级河流阶地, 经历了复杂的构造活动和自然改造过程, 仅通过航空正射影像(图6b)难以对这些阶地面进行准确的划分和定量研究, 但高精度和高分辨率的DEM数据为复杂地貌面的划分提供了强有力的支撑。
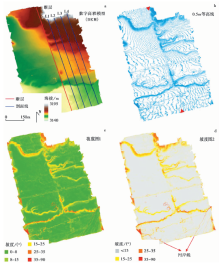
通过对高精度DEM(图8a)进行预处理, 可以获取等高线图、 坡度图、 坡向图以及地表粗糙度等信息。为了突出体现地形的起伏变化, 以便识别微小的构造活动信息, 我们提取了该研究点的等高线图(图8b)和坡度图(图8c)。等高线的疏密程度需要依据研究目的而定, 过于密集将包含大量噪点信息, 而过于稀疏则会遗漏残余构造信息(高帅坡等, 2017)。为了准确识别构造信息, 生成了等高距为0.5m的等高线。同时, 将地形按照坡度分成5个坡度段, 并突出显示了地面坡度> 15° 的区域(图8d), 这些信息有助于定性识别地形异常区, 为复杂地貌面的初步划分提供依据。
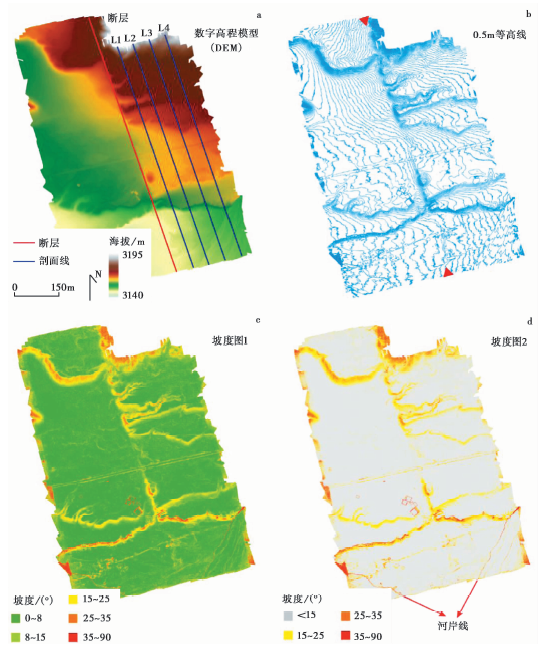 | 图8 高精度DEM及其衍生图 a 高精度DEM; b 等高距为0.5m的等高线图; c 由DEM生成的坡度图, 分为5个坡度区间; d 由DEM生成的坡度图, 突出坡度> 15° 的区域Fig. 8 High precision DEM and its derived graph. |
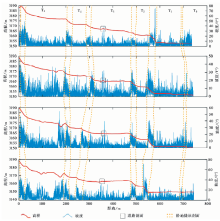
基于高精度的DEM及其衍生图, 可以对研究区的地貌面进行精细的解译。地形起伏大的区域可能存在构造信息或是重要的地貌标志线, 等高线较为密集, 地表坡度也较大, 可以成为地貌面划分的重要边界线。而等高线稀疏和坡度较小的区域地形较为平坦, 这些区域被多条边界线分隔。通过对图8中的等高线图(图8b)和坡度图(图8d)进行综合分析和比较可以发现, 该研究点表现为典型的山前地貌特征, 由于断裂的活动, 造成了不同阶地地貌的断错和变形, 并保留了清晰的高度不一的断层陡坎。为了对这些复杂的多级阶地面进行定量地貌分析, 我们选择了目前常用的基于DEM的剖面提取方法(张会平等, 2004, 2006; 赵尚民等, 2009; 邹斌文等, 2011), 提取平行于断层陡坎的地形剖面线。由于部分阶地受到水流的堆积作用, 导致在断层下盘并没有延续, 因此选择了断层上盘的区域进行了精细的研究。利用剖面提取方法的思路, 基于高精度DEM在平行于断层方向上提取了4条地形剖面线和与之对应的坡度剖面线(图8a), 并对这些剖面线进行了对比分析(图9), 以便剔除一些干扰因素对地形地貌的影响, 从而充分表现各级阶地的高程和坡度的变化。利用剖面提取方法获得的高程和坡度的定量信息, 对于复杂多级地貌面的精细解译提供了有力的支撑。
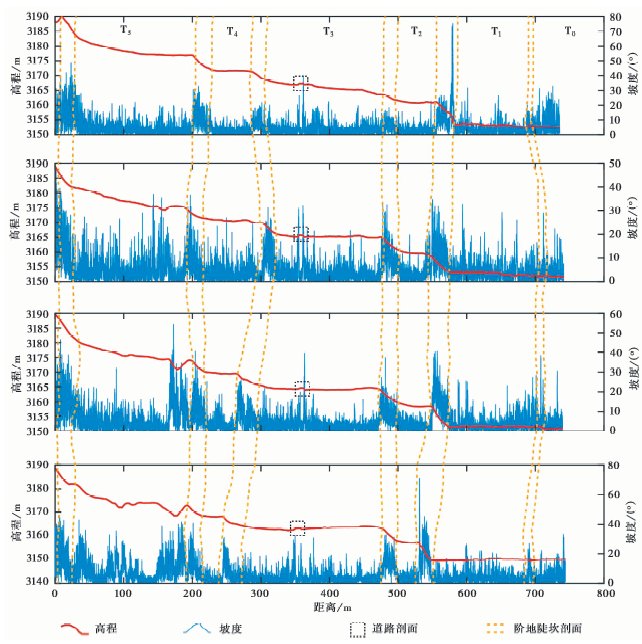 | 图9 阶地横剖面地形和坡度图Fig. 9 Topography and profile of the terrace cross section. |
确定河岸线(图8d)作为河道与T1阶地的分界线, 并沿着更高级阶地剖面线方向寻找地形变化较大的关键转折点, 可以对各级阶地面进行初步的划分。为了剔除一些干扰因素(如地表侵蚀作用或人工构筑物)对地形地貌的影响, 将4条地形剖面图纵向排列, 根据初步划分的阶地面进行纵向对比, 并结合坡度信息, 最终对各级阶地面进行精细的划分, 确定了该区域共发育6级阶地。
坡度图直接受到地形变化的影响, 可以记录地形的局部变化。各级地貌面的分界线附近在坡度图上表现为明显的峰值。其中, T1阶地和T2阶地之间地形高差大, 在坡度图上形成了最大的峰值。
同时, 坡度图能够反映一些局部异常信息。地形剖面图显示, 靠近T3阶地中部有局部的隆起, 对照该区域的正射影像(图6b)可以发现, 在垂直于断裂的方向上, 有1条进山的道路高出地面, 这一现象很好地被坡度图所记录。在地形剖面图上, T5阶地由于受到地表侵蚀作用的影响, 局部出现隆起或凹陷的现象, 在坡度图上出现了明显的峰值。
综合该区域阶地横剖面地形图和坡度图, 结合定量数据进行综合分析, 对该区域的各级阶地面进行了精细的解译(图10)。
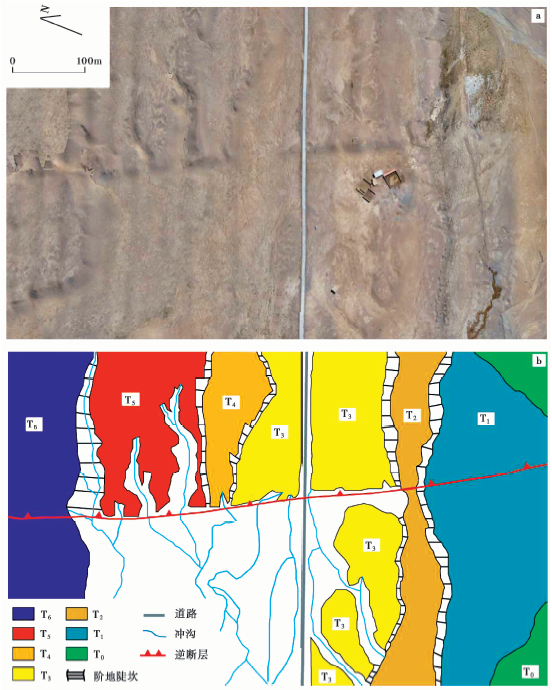 | 图10 研究点正射影像图(a)和阶地解译图(b)Fig. 10 The orthophoto map(a)and terrace interpretation map(b)of the study area. |
高精度DEM提取的河流阶地横剖面的地形和坡度信息为地貌面的精细解译提供了有力的支撑。采用同样的思路, 结合精细地貌解译的结果, 可以在垂直于断裂的方向上提取地形剖面数据, 以便确定各级地貌面的垂直断错量。在后期数据处理时, 可以通过拟合分别获得上盘和下盘地形线的拟合直线(图11g中的L1和L2), 进而获得能够代表断层陡坎高度的值h(图11)(俞晶星, 2013; 张宁, 2016)。通过提取的地形剖面线, 分别对位于上盘和下盘的地形线进行最小二乘拟合, 最终确定了T1-T3阶地的垂直位移量分别为(1.01± 0.06)m、 (1.37± 0.13)m和(3.10± 0.11)m。由于T1、 T2以及T3阶地保存较为完整, 其断错量可以视作断层实际的垂直位移; 而T4至T5阶地后期受到了不同程度的侵蚀, 在断层下盘并没有延续, 直接利用测线拟合的方式可能导致高阶地垂直位移的测量值偏小, 尽管如此, 可以基于高精度的DEM精确地限定高阶地垂直位移的下限, 即T4和T5阶地的垂直位移下限分别为(3.77± 0.14)m和(5.46± 0.26)m。
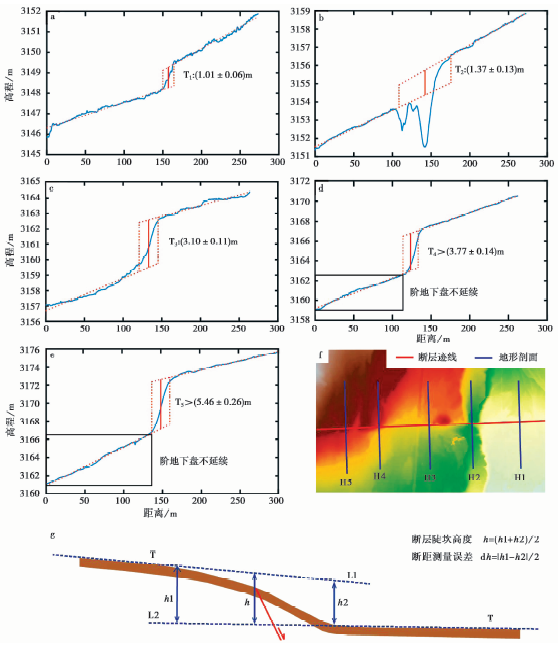 | 图11 各级阶地垂直断错量的确定及测量图解 a-e 各级阶地垂直断错量的确定; f地形剖面的提取位置; g 断层陡坎测量图解Fig. 11 Vertical dislocation of the terraces and the schematic diagram. |
利用无人机摄影测量技术获取的高分辨率地形数据, 能够精细识别微小的断错地貌特征, 极大地提高了被断错地貌体的识别度以及位移测量的准确性(魏占玉等, 2015; 杨海波等, 2016; 毕海芸等, 2017)。该方法获取的DEM分辨率可以达到dm级甚至cm级, 与常用的DEM, 如SRTM DEM(分辨率为90m)和ASTER DEM(分辨率为30m)相比, 分辨率提高了2~3个数量级。对于一些在常用DEM上无法精细识别的亚米级的垂直断错地貌, 在利用该方法获取的地形数据上却能够清晰展现, 实现了对断层几何和断裂微地貌的高清晰度三维再现(刘静等, 2013; 毕海芸等, 2017)。利用获取的多级阶地的高精度垂直位移测量结果, 结合不同地貌面的年代信息, 可以进而确定断裂不同时段的滑动速率, 大大降低了滑动速率计算的不确定性。
本文介绍了SfM摄影测量方法的基本原理以及作业流程, 并基于无人机对青海茶卡盆地北缘断裂上1个典型的断错地貌点进行了航空影像的采集和数据处理, 生成了密度高达273点/m2的点云数据, 并基于高密度点云进一步生成了地面分辨率优于0.1m的超高分辨率DEM。利用DEM剖面方法提取的地形剖面和坡度剖面信息, 对复杂的多级地貌面进行了精细的地貌解译, 基于地貌解译的结果, 进一步获取了通过遥感影像难以直接获得的断裂垂直位移信息, 显示了该方法在活动构造定量研究中的巨大潜力。
高精度和高分辨率的地形数据在活动断裂精细地貌识别、 同震地表变形的识别、 断错地貌累积位移的获取和断错微地貌分析等断裂活动性的精细研究等方面有着广阔的应用前景。在高精度和高分辨率地形地貌数据获取方面, 相比于LiDAR技术, 无人机摄影测量技术不仅成本更低, 而且后期的数据处理也更为简单, 已经成为一种广泛使用的高精度地形地貌数据的获取技术。尽管该方法目前还存在着一定的局限性, 如测量区域面积有限, 易受到飞行平台续航时间和天气等因素的影响, 且在植被发育茂密的区域效果不理想, 但这些问题有望随着技术的发展逐步得到解决。总之, 无人机摄影测量技术在数据获取和处理的便捷程度、 数据精度和分辨率以及数据获取成本等各方面均具有良好的发展前景, 已成为活动构造定量研究中的一种重要技术手段。
致谢 中山大学地球科学与工程学院提供了数据处理支持, 审稿专家对文章修改提出了宝贵意见, 在此一并表示感谢。
The authors have declared that no competing interests exist.
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
|
| 29 |
|
| 30 |
|
| 31 |
|
| 32 |
|
| 33 |
|
| 34 |
|
| 35 |
|
| 36 |
|
| 37 |
|
| 38 |
|
| 39 |
|
| 40 |
|